

开源版OpenAI机器人2.5万打造!斯坦福李飞飞团队祭出「灵巧手」,泡茶剪纸炫
开源版OpenAI机器人2.5万打造!斯坦福李飞飞团队祭出「灵巧手」,泡茶剪纸炫技

新智元报道
编辑:编辑部
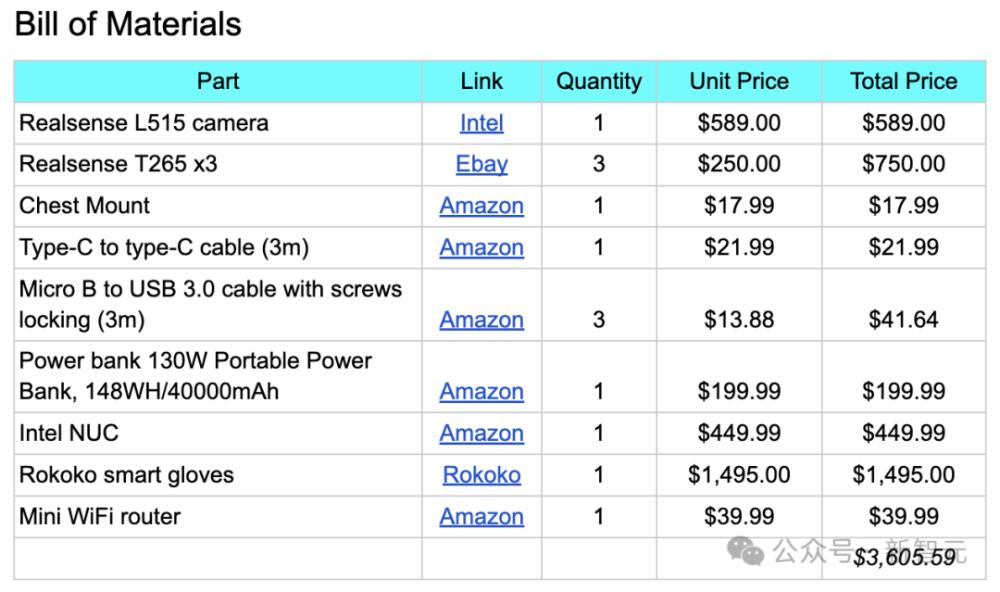
【新智元导读】「OpenAI 机器人」一出世惊艳众人!最近,李飞飞团队打造了一个开源便携式手部动捕系统—— DexCap,成本仅 3600 美元,就能让机械灵巧手完成花样任务。
OpenAI 大模型加持的机器人 Figure 01,昨天火爆了全网。
而今天,真正「开源版」的擎天柱 /Figure 01 诞生了,而且背后团队还将成本打了下来。
成本只要 3605.59 美元!
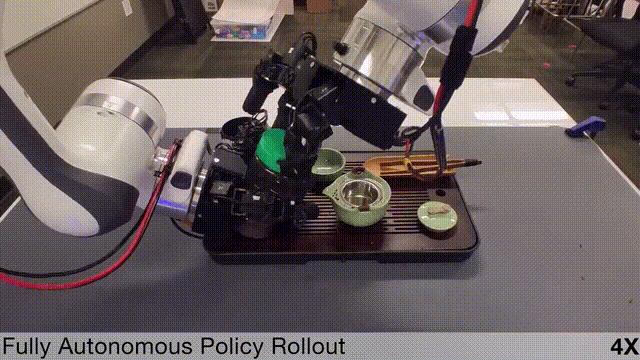
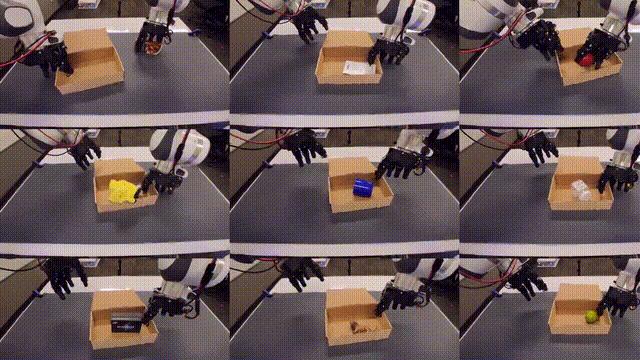
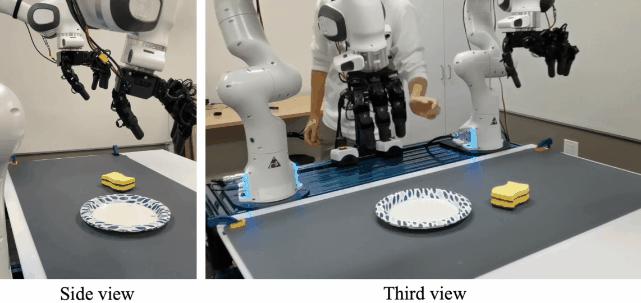
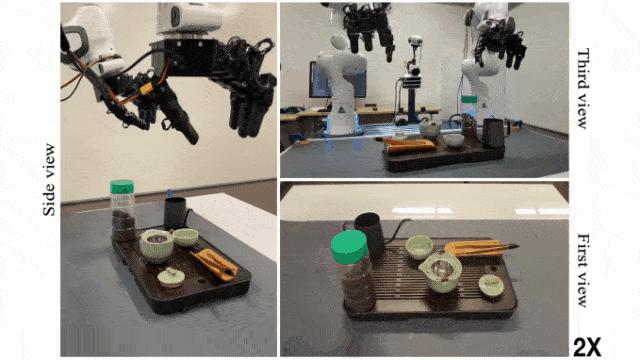
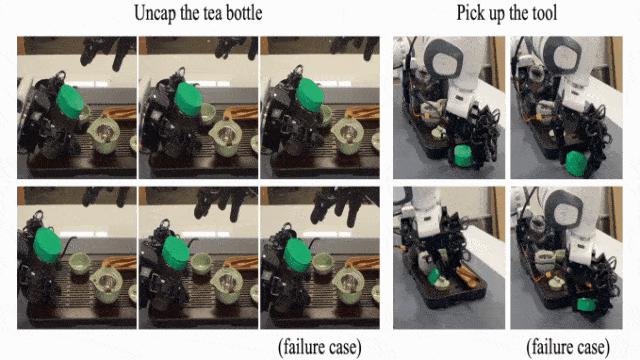
它拥有一双灵巧手,就比如泡茶,先是拧开瓶盖,再拿茶镊将茶叶挑进杯中,并放回原位。
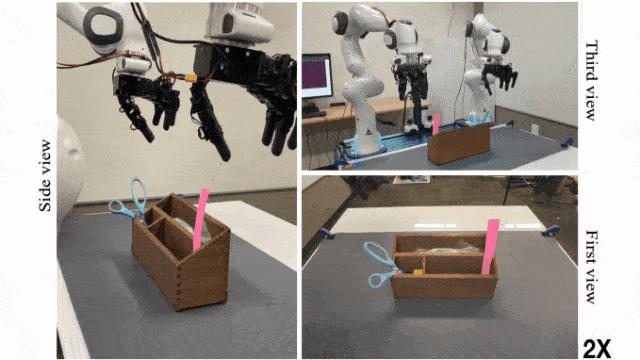
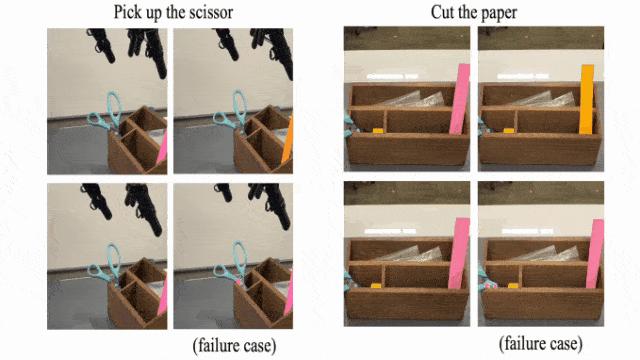
快看,它能一手拿着剪刀,一手拿着便利签纸,执行人类剪纸这一动作。(不过剪断的这个过程好难)
它还可以将胶带纸,放到收纳的纸盒中,一手拿胶带摆放,一手将盒子推近。
而且不管这个物体是什么,它都能照样完成。
与前段时间爆火的炒虾机器人不同的是,「灵巧手」并非通过远程操控完成任务。
是因为,凭借一副特制的手套,它可以通过各种传感器捕捉到手部精确的运动数据。
这正是由 Chen Wang、李飞飞和 Karen Liu 等人提出的「便携式手部动作捕捉系统」—— DexCap。
论文地址:https://arxiv.org/abs/2403.07788
DexCap 是一套基于 SLAM、电磁场,以及对环境的 3D 观察,便能实时追踪手腕和手指运动的系统。
与传统基于视觉动捕技术不同,它不会因为视线遮挡,而无法收集数据。

与此同时,他们还设计了全新的模仿算法 DEXIL,才用了逆运动学和基于点云的模仿学习。
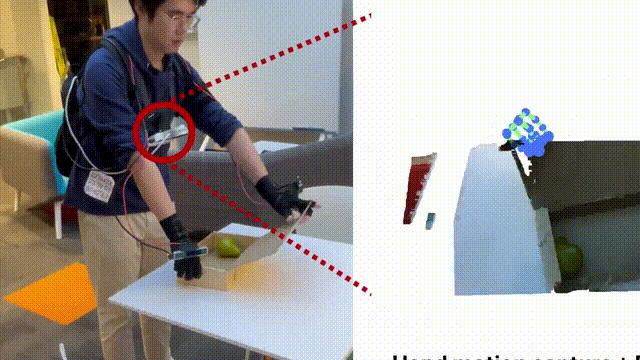
当手部动作数据收集完成,DexCap 就会利用背包中的迷你 PC,通过 RGB-D 相机重建 3D 场景。
然后将运动数据与之对齐,这样,就可以得到非常精确的手部动作模型,可用于进一步的机器人训练。
值得一提的是,在对具体 6 项操作任务评估中,DexCap 展现出卓越的完成能力。
而且,它还可以从野外动捕数据中有效学习,为未来灵巧操作的数据收集方法提供了方法。
Jim Fan 认为 DexCap 是「低配版的 Optimus」,关键只要 3600 美元,一般人也能买得起。
另外,他还特意强调,数据收集和机器人的执行是分离的。
还有网友称,「DexCap 绝对震撼,我们正在进入个人机器人与个人 AI 的下一阶段」。
全新手部动捕系统 DexCap,不怕遮挡
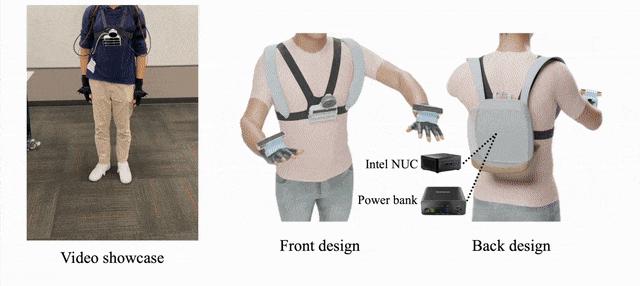
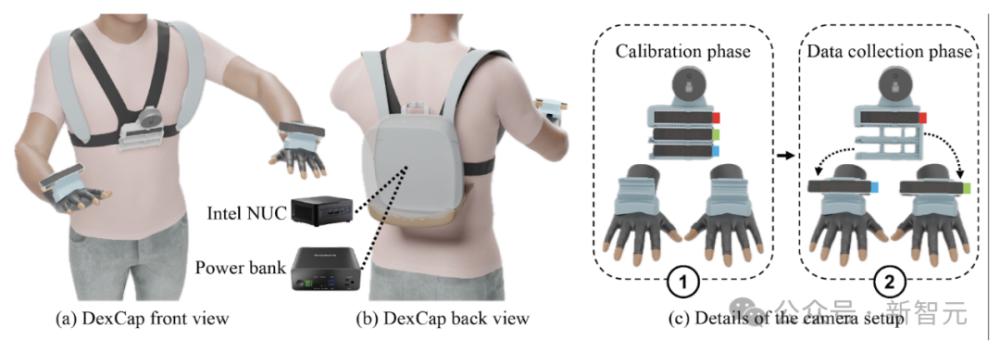
DexCap 系统核心设计,就在于前向后向设备的组合。
具体来说,正面设计的胸部相机架上,配备了一个 RGB-D 激光雷达摄像头和三个 SLAM 追踪摄像头。
背面的背包中,有一个迷你 PC,以及电源为系统供电。大约可进行 40 分钟的数据收集。
此外,还需要一个动捕手套,以便进行手部动作的捕捉。
追踪摄像头最初放置在胸前机架上,进行校准。
然后在具体数据收集过程中,将摄像头从校准架上取下,安装到特制的手部支架上。
这样,系统就可以持续追踪手部的位置。
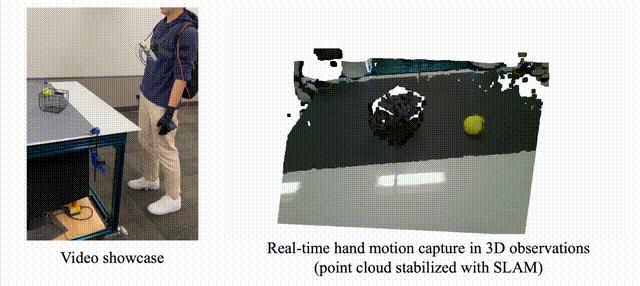
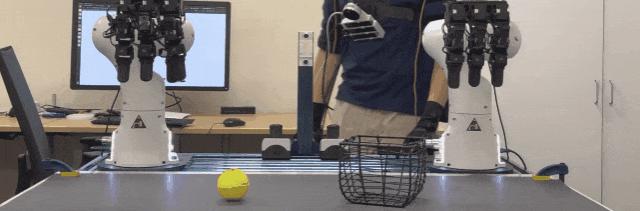
可以看到,网球被放进框里,再倒出来,整个动作都清晰可见。
机器人更多的训练数据,这不就来了么。

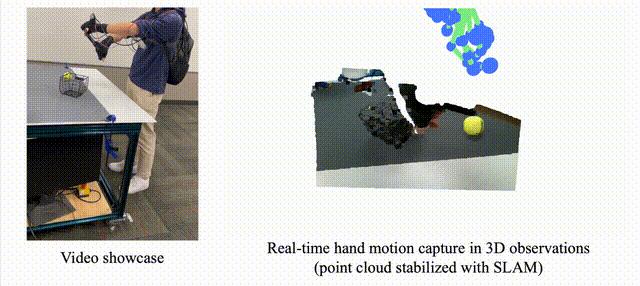
数据可视化:点云观测中的 3D 手部运捕数据
再来看数据采集吞吐量,DexCap 可以实现与人类自然运动同水平的效果,而且是远程操作的 3 倍。

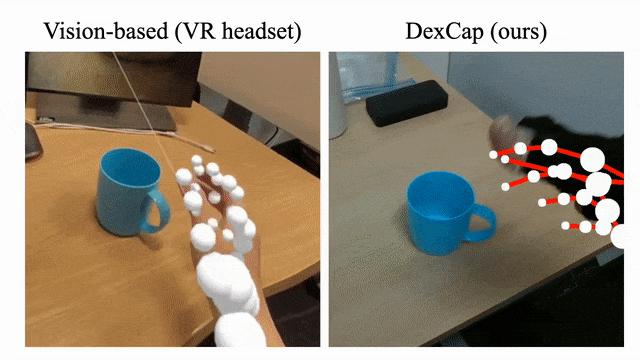
再看如下用固定的手势握住杯子手柄的动作。
VR 头显使用了基于视觉的手部追踪方法,却因严重遮挡而无法准确追踪手部动作。
显然,DexCap 无障碍收集了手与物体交互的数据。
从人类行为模仿学习
研究人员的目标是利用 DC 记录的人手动作捕捉数据,来训练灵巧机器人策略,这个过程中会面临 3 个问题:
(1)如何将人手的运动重新定位到机器人手?
(2)什么算法可以学习灵巧的策略,而且要适应双手动作的高维空间?
(3)研究直接从人类动捕数据中学习的失败案例以及潜在的解决方案。
为了应对这些挑战,研究人员引入了 DexIL,一个使用人手动作捕捉数据训练灵巧机器人的三步框架。
第一步,将 DEXCAP 数据重新定位到机器人实施例的动作和观察空间。
第二步,使用重新定位的数据训练基于点云的扩散策略。
最后一步,可以采用人机交互来进行校正,旨在解决策略执行期间出现的意外行为。
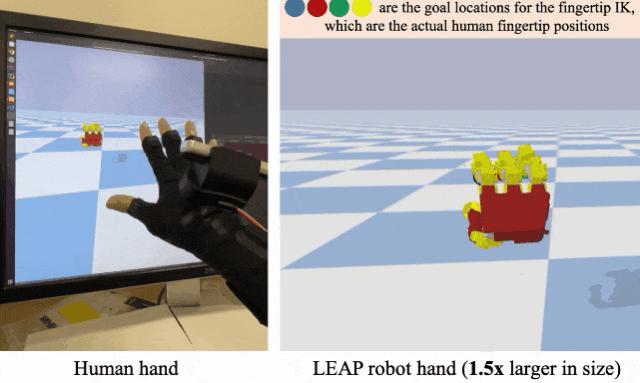
动作重定向:
LEAP 手比人手大了约 50%,这种尺寸差异使得很难将手指运动直接转移到机器人硬件上。
为了解决这个问题,研究人员使用指尖逆向运动学(IK)来计算 16 维关节位置,并使用动捕手套跟踪人体手指的运动,手套根据电磁场(EMF)测量手指相对于手掌的 3D 位置。
视觉差距:
观察和状态表示选择对于训练机器人策略至关重要。为了进一步弥合人手和机器人手之间的视觉差距,研究人员使用正向运动学生成机器人手的点云网格,并将其添加到点云观察中。
使用相机参数将 DCdata 中 LiDAR 相机捕获的 RGB-D 图像转换为点云。这种额外的转换提供了两个显著的好处。
首先,由于 DEXCAP 允许人体躯干在数据采集过程中自然移动,因此直接使用 RGB-D 输入需要考虑移动的相机帧。
而通过将点云观测转换为一致的世界坐标系,可以隔离并消除躯干运动,从而实现稳定的机器人观察。
其次,点云提供了与机器人操作空间对齐的灵活性。由于在野外捕获的一些运动可能超出了机器人的运动范围,所以需要调整点云观测和运动轨迹的位置来确保操作范围的可行性。

观察重定向:
为了简化在人和机器人之间切换相机系统的过程,相机机架的背面集成了一个快速释放带扣,可以在不到 20 秒的时间内快速更换相机。
通过这种方式,保证机器人可以使用人类收集数据时的同一台相机。
通过上述设计,DexIL 可以直接从 DCdata 学习复杂的灵巧操作技能(比如拾取、放置、双手协调等),而无需机器人数据。
30 分钟人类数据,机器人「学废了」
根据上面的分析,首先通过 RGB-D 观测构建 3D 点云,并转换到机器人的操作空间,将 DexCap 数据重定位到机器人实例中。
同时,手部动作捕捉数据也要重定位到带有指尖 IK 的机械臂。
基于这些数据,学习扩散策略,将点云作为输入,并输出一系列未来目标位置作为机器人动作。
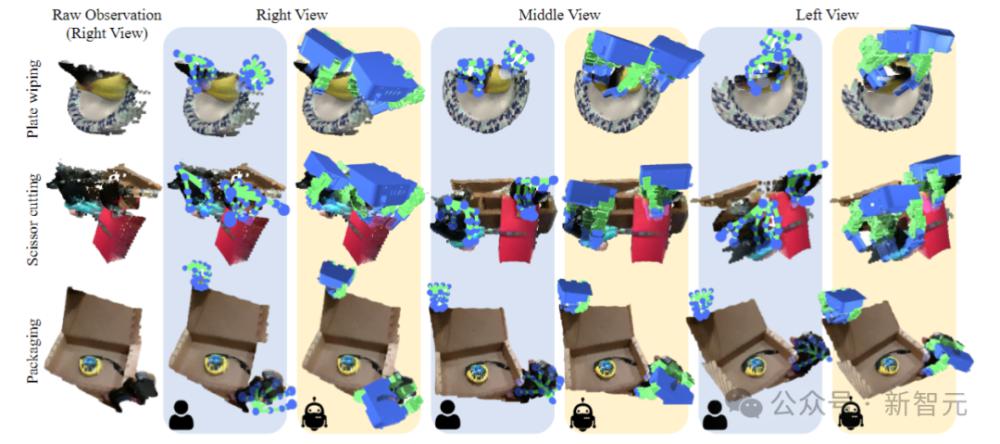
上图展示了 DC 以 3D 形式捕捉详细手部运动的能力,将人类动作与所有视图中的对象点云对齐。
黄色列表示重定位后的机器人手部动作,我们可以看到它们与蓝色列在同一 3D 空间中精确对齐。
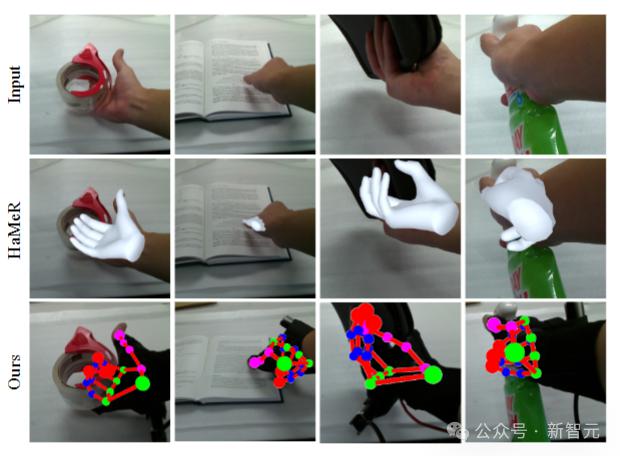
上图中,将 DC 与最先进的基于视觉的手部姿态估计方法 HaMeR 进行了比较,从相似的角度观察它们的性能。
HaMeR 在严重遮挡的情况下表现不佳,要么无法检测到手,要么无法准确估计指尖位置。相比之下,DC 在这些条件下表现出良好的鲁棒性。
结果演示:
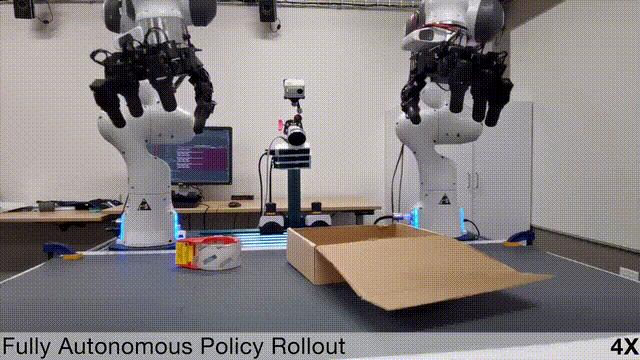
下图的捡球任务,只使用 30 分钟的人类动作捕捉数据来学习策略,无需任何远程操作。

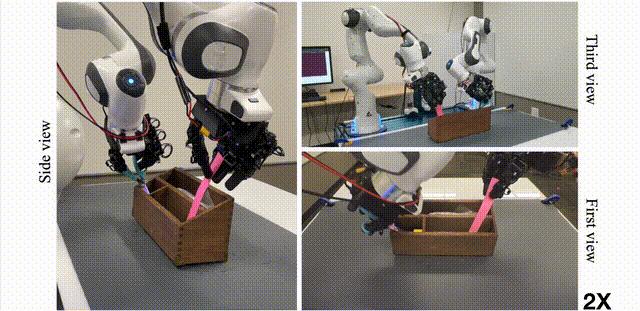
双手操作任务:
先收集双手的人体动捕数据,然后进行完全自主的策略部署。
用 DexCap 进行 RLHF
DexCap 系统在执行任务时提供了两种便捷的人在回路纠正,让用户能够根据需要灵活调整机器人的动作:
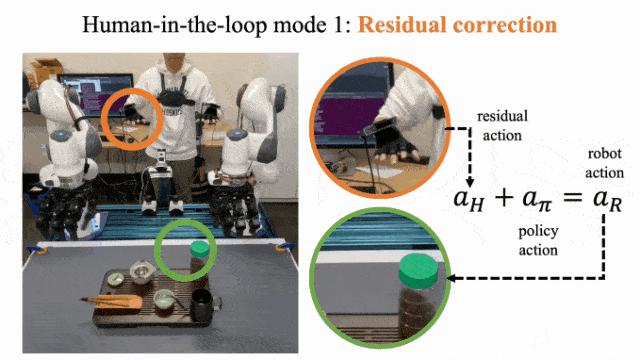
1. 残差纠正模式:
系统会实时捕捉用户手腕的微小位移变化,并将这些变化作为额外的动作指令加入到机器人的动作中,从而实现精细控制。这种模式可以实现最小的运动,但需要用户进行更精确地控制。
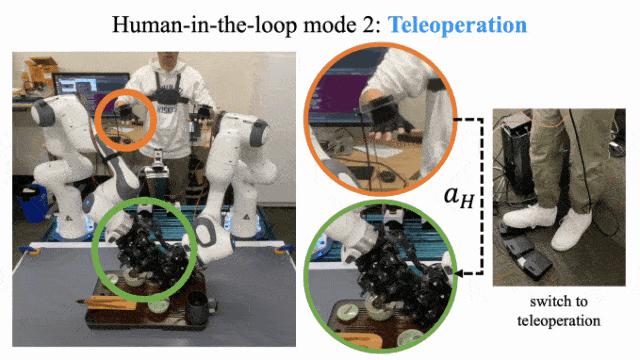
2. 遥控操作模式:
通过逆向运动学算法,用户的手部动作会被转化为机器人末端执行器的相应动作,适用于需要全面控制机器人的场景,但相对而言需要用户付出更多的努力。用户可以通过简单地踩下脚踏板来在这两种模式之间自由切换。
最后,这些纠正动作会被记录并保存在一个新的数据集中,并与原始训练数据一起进行均匀采样,从而更好地调整机器人的行为策略。
微调后:泡茶
通过分析 1 小时人类动捕数据并进行 30 次人在回路纠正后学到的策略:
微调后:使用剪刀
通过分析 1 小时人类动捕数据并进行 30 次人在回路纠正后学到的策略:
硬件教程
地址:https://docs.google.com/document/d/1AN
xSA_PctkqFf3xqAkyktgBgDWEbrFK7b1OnJe54ltw/edit#heading=h.t3oe3oo3ujny
CAD 模型清单 打印项目包括:
- 中心相机架和连接板
- 两个手套相机支架(分别为左手和右手设计的镜像版本)
- 两个 T265 相机的后装板(同样需要左右镜像)
相关的 STL 文件如下:
地址:https://drive.google.com/drive/folders/1pfUISMJTJU68g6HkjKkiJAOBtRBKKByx?usp=
sharing
为了确保打印出的零件能够顺畅运作,建议将滑槽部分的打印角度保持在与 Z 轴的倾斜角度在 45 度以内。
作者介绍
Chen Wang
论文一作 Chen Wang 是斯坦福大学 CS 的一名博士生,导师是李飞飞教授和 C. Karen Liu。
在加入斯坦福大学之前,他曾在 Machine Vision and Intelligence Group 工作,导师是 Cewu Lu 教授。
-

- 中东,电商巨头藏不住的小心思
-
2024-03-18 04:59:09
-

- 全球学术圈险被ChatGPT论文攻陷,知名出版商紧急撤稿,AI插图笑翻网友
-
2024-03-18 04:56:54
-

- 李斌“背后”的女人王屹芝,向章泽天致歉了
-
2024-03-18 04:54:38
-
- 国内创业者和投资人如何看待 Figure 01 机器人:距离具身智能还有多远?
-
2024-03-18 04:52:22
-

- 安徽“神秘富豪”被留置:身家百亿,投资60家公司
-
2024-03-18 04:50:06
-
- “德国钢笔”LAMY卖身:百年品牌抵不过时代浪潮
-
2024-03-15 19:55:34
-

- 24家车企63款车型降价,汽车价格战何时休?
-
2024-03-15 19:53:18
-

- 抖音还能更“便宜”吗?
-
2024-03-15 19:51:02
-
- 大模型竞赛,赛点在哪?
-
2024-03-15 19:48:47
-
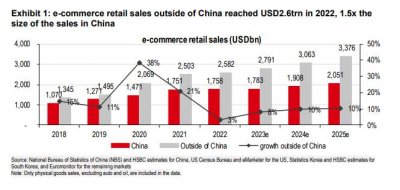
- 汇丰:等待中国四大电商的,是明年5000亿美元的海外市场
-
2024-03-15 19:46:31
-

- “三国杀”到群雄并起:2024,电商几分天下?
-
2024-03-15 19:44:15
-

- 从60元降到2.5元?网红大牌价格“狂跌”调查:经销商称厂家有意控量!创始人
-
2024-03-15 19:41:59
-

- 贝壳:哪怕地产冰封,幸有股息托底
-
2024-03-15 19:39:43
-

- 同样的短剧不同的价格,困在短剧里的中老年人成为了“优质用户”
-
2024-03-15 19:37:28
-

- 一哄而上,打不赢美国高科技
-
2024-03-15 19:35:12
-

- 娃哈哈销量暴涨,农夫山泉微跌,饮料市场会变天吗?
-
2024-03-13 23:49:16
-

- 前泉州首富出局,“鞋王”退市,全网仍有超900万粉丝
-
2024-03-13 23:47:00
-

- 诺基亚800元新机上市,百元机“苍蝇腿也是肉”?
-
2024-03-13 23:44:44
-

- 爱奇艺变戏法
-
2024-03-13 23:42:28
-

- 市场监管总局发布电动自行车等5类产品消费提示
-
2024-03-13 23:40:12
 苹果Vision Pro,被华强北啃了
苹果Vision Pro,被华强北啃了 北京等地上空疑现不明飞行物!目击网友称“飞着飞着就没了”
北京等地上空疑现不明飞行物!目击网友称“飞着飞着就没了” 2831人考试2093人次替考!广州开放大学分管副校长解聘
2831人考试2093人次替考!广州开放大学分管副校长解聘 毛戈平7年IPO折戟,国货化妆品的出路在哪里
毛戈平7年IPO折戟,国货化妆品的出路在哪里 不想过年的年轻人,躲回工作中
不想过年的年轻人,躲回工作中 荣耀赵明:Magic6要在体验上超越iPhone而不是参数上
荣耀赵明:Magic6要在体验上超越iPhone而不是参数上 大模型浪潮不能使鬼推磨,但可以让周鸿祎、傅盛握手言和
大模型浪潮不能使鬼推磨,但可以让周鸿祎、傅盛握手言和 对伏是什么意思 伏的意思是什么
对伏是什么意思 伏的意思是什么 嘉行传媒还“行”不“行”?
嘉行传媒还“行”不“行”? 红薯原产地是哪个国家 红薯原产地是哪个国家或地区生产的
红薯原产地是哪个国家 红薯原产地是哪个国家或地区生产的